Providing efficient solutions for maritime vessels throughout the world.
The PR-9000 model is the latest autopilot system from TOKYO KEIKI. The PR-9000 is designed using the latest technology from a wealth of engineering and manufacturing experience of navigational instruments.
It's series utilizes color LCD displays which greatly enhance the viewability of all navigational data, and system monitoring information is provided to assist the operator with selection of a back up system of operation when an abnormality occurs.
Features
- Enhanced Information Awareness
Color LCDs are incorporated into each system enhancing reliability of information and improving situational awareness.
Features include color-coded steering information and popup-windows for easy to understand information to the helmsman.
(Enhanced alarm presentation, avoidance operation information function, system condition display etc.)
- Enhanced Safety/Reliability
Two independent systems are arranged and an independent monitoring system is installed monitoring each system.
Equipped with features that help to improve the independence of each system, enhances operation and monitoring from all of the ship's systems and sensors, and improves overall safety and reliability.
- Energy efficient and safe navigation
The newly-installed Adaptive Control(NCT)*1 system automatically contributes to the most suitable steering. Unnecessary rudder movement due to external influences such as waves is significantly reduced contributing to a more energy efficient navigation.
Also, when the Route Control function(ACE)*2 is installed, the course can be controlled using only the Autopilot.
Track Control System(TCS)*3 steering is also possible when connected with ECDIS(Electronic Chart Display and Information System).
Maintaining the pre-planned / pre-checked route with ECDIS allows for a safe and more efficient navigation.
- Flexible system configuration
Console mounting type has been added to the line up to respond to any type of bridge layout and design.
Remote Control and Override operation connectability has been increased so that up to 8 units can be connected.
*1:Notable Control Technology (Option)
*2:Advanced Control for Ecology (Option)
*3:Track Control System (Option)
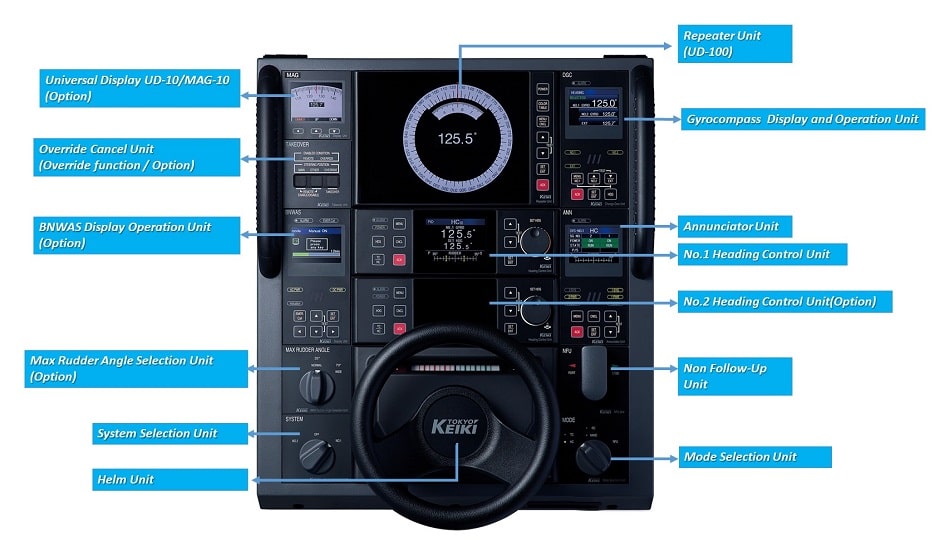
Fascia Panel (click to enlarge image)
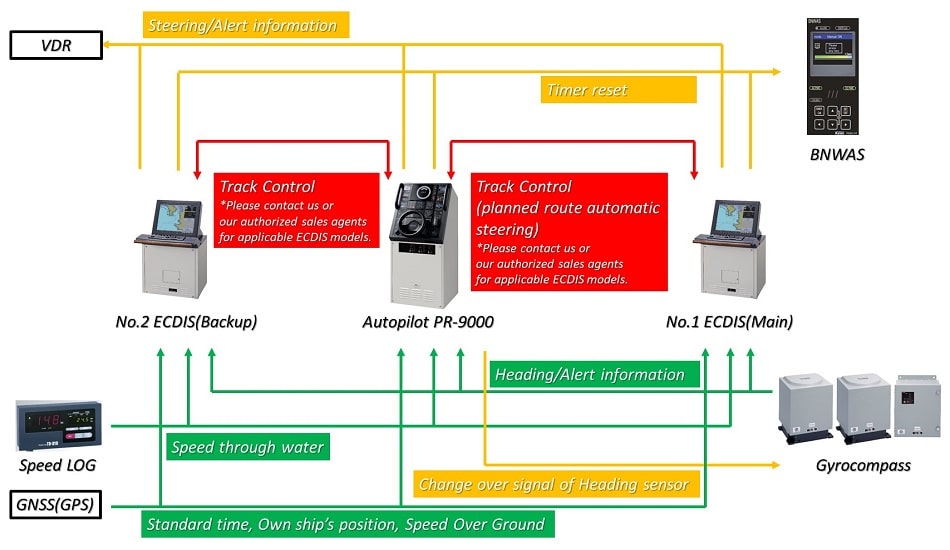
System configuration (click to enlarge image)
Track Control System(TCS)
TCS function is available as an optional operation mode of Autopilot with ECDIS. Once the operator creates a planned route on ECDIS, the vessel can follow the route automatically by selecting TCS mode on Autopilot. Autopilot PR-9000 calculates and corrects the ship's drift during TCS mode so that the vessel can maintain the most optimum route. TCS supports the highest level of navigation and safety by following the pre-planned/pre-checked route automatically and precisely.
Adaptive Control(NCT : Notable Control Technology)
PR-9000 can adopt TOKYO KEIKI's special control method NCT as an optional heading control method. PID (Proportional-Integral Derivative), well known as conventional heading control method on Autopilot, requires operators to manually adjust the environmental setting to accommodate the vessel's characteristic maneuvering motions and its external influences. NCT has been developed to make the vessel "adaptive" by automatically calculating the appropriate settings of those motions/influences by PR-9000's original algorithm.
(NOTE) The conventional 「Autopilot」 is now called 「HCS(Heading Control System)」in the SOLAS.
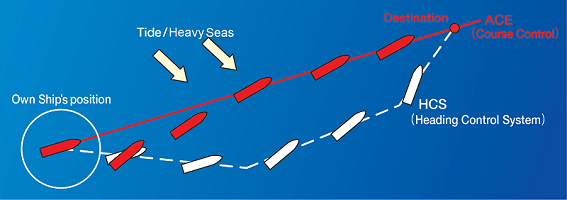
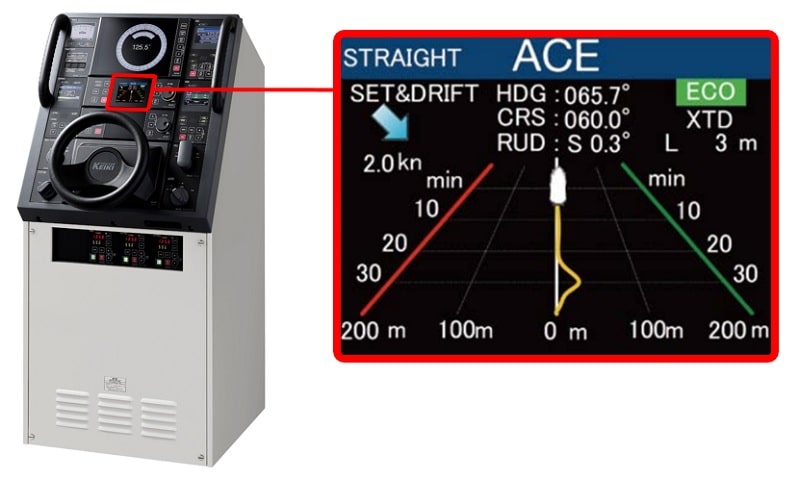
Route Control function(ACE : Advanced Control for Ecology)
ACE makes it possible to control a straight route with the PR-9000 without having to connect it to the ECDIS.
With Autopilot(HCS)
*4, the ship follows the direction of the set course and influence form tides or heavy seas can move the ship off course prior to arrival at the destination which in turn increases the navigation distance.
Due to this external influence, small steering changes must be performed in order for the ship to return to the original planned destination.
With the new Route Control(ACE), a route is automatically created on the heading between the current position and the destination, outside disturbances(tides) etc., are calculated, and the best rudder control is implemented making it possible for the vessel to sail on the newly designated route more efficiently..
When compared to Autopilot, reduced route deviation/ shorter sailing distance/ reduction of wasted rudder ultimately contributes to safe and energy efficient navigation.
*4:Conventional "Autopilot" is now known as "HCS" or Heading Control System in SOLAS.
*Design and specifications are subject to change without notice.